
Multi-axis 3D positioning
AQUA CUTTER
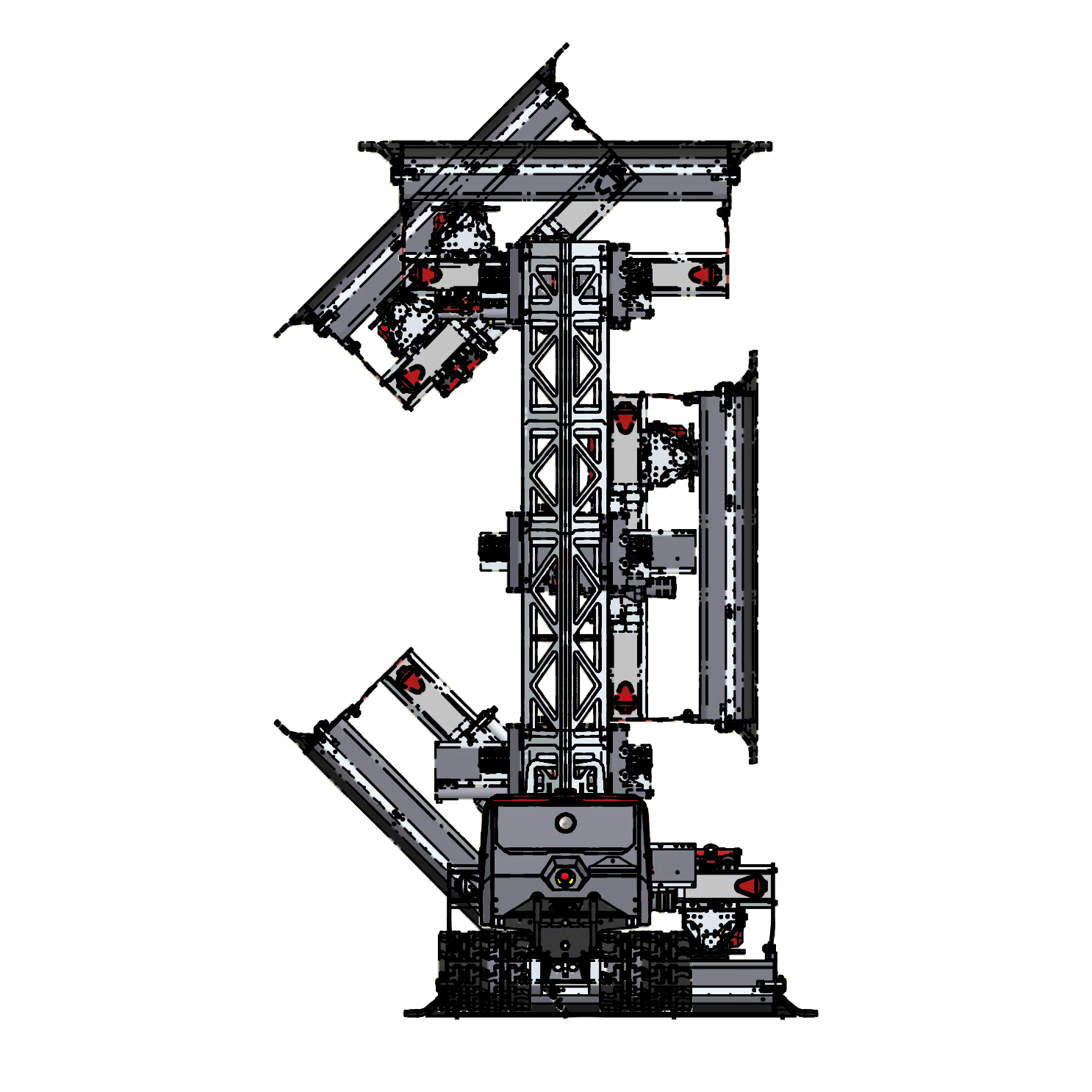
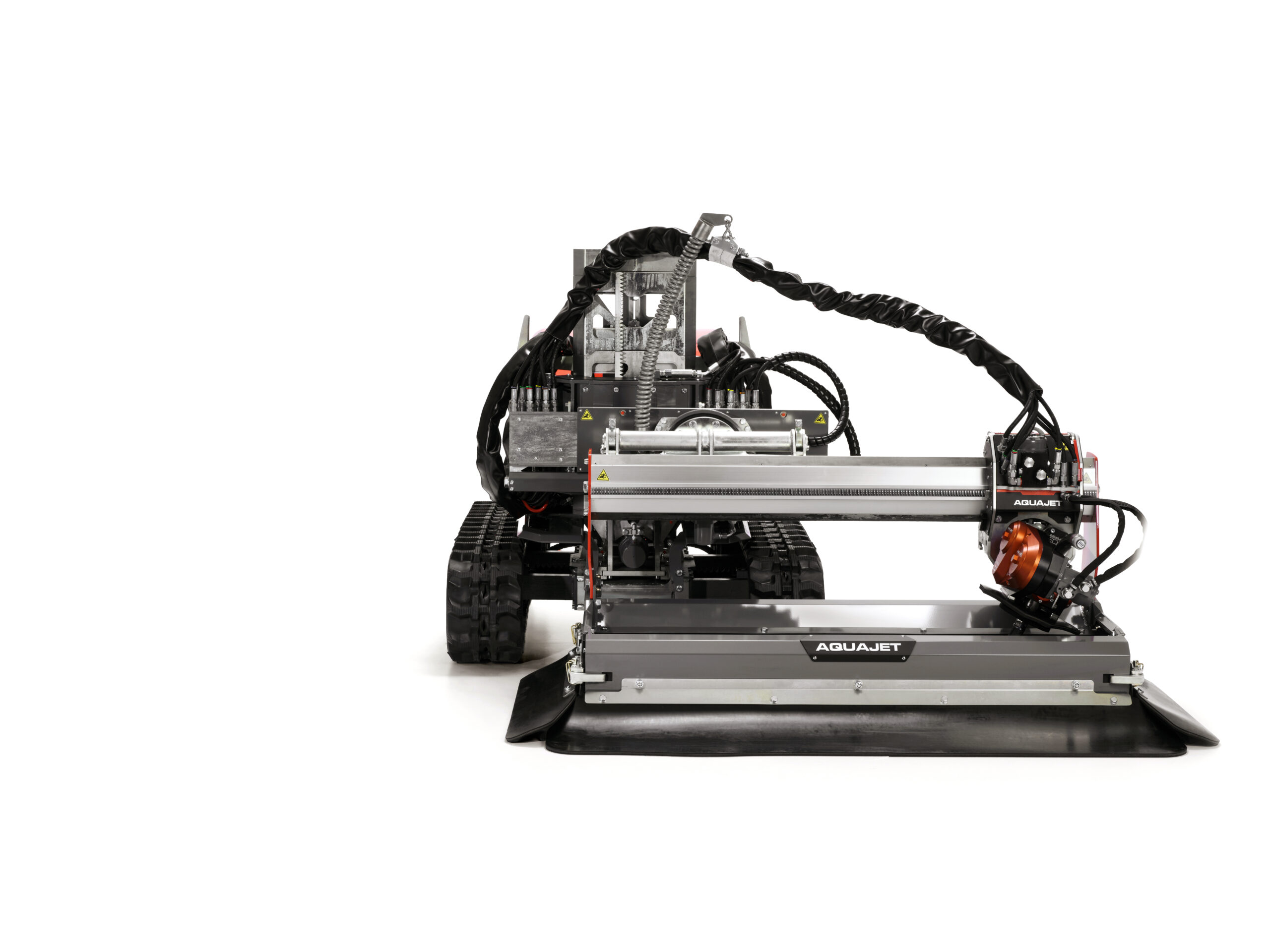
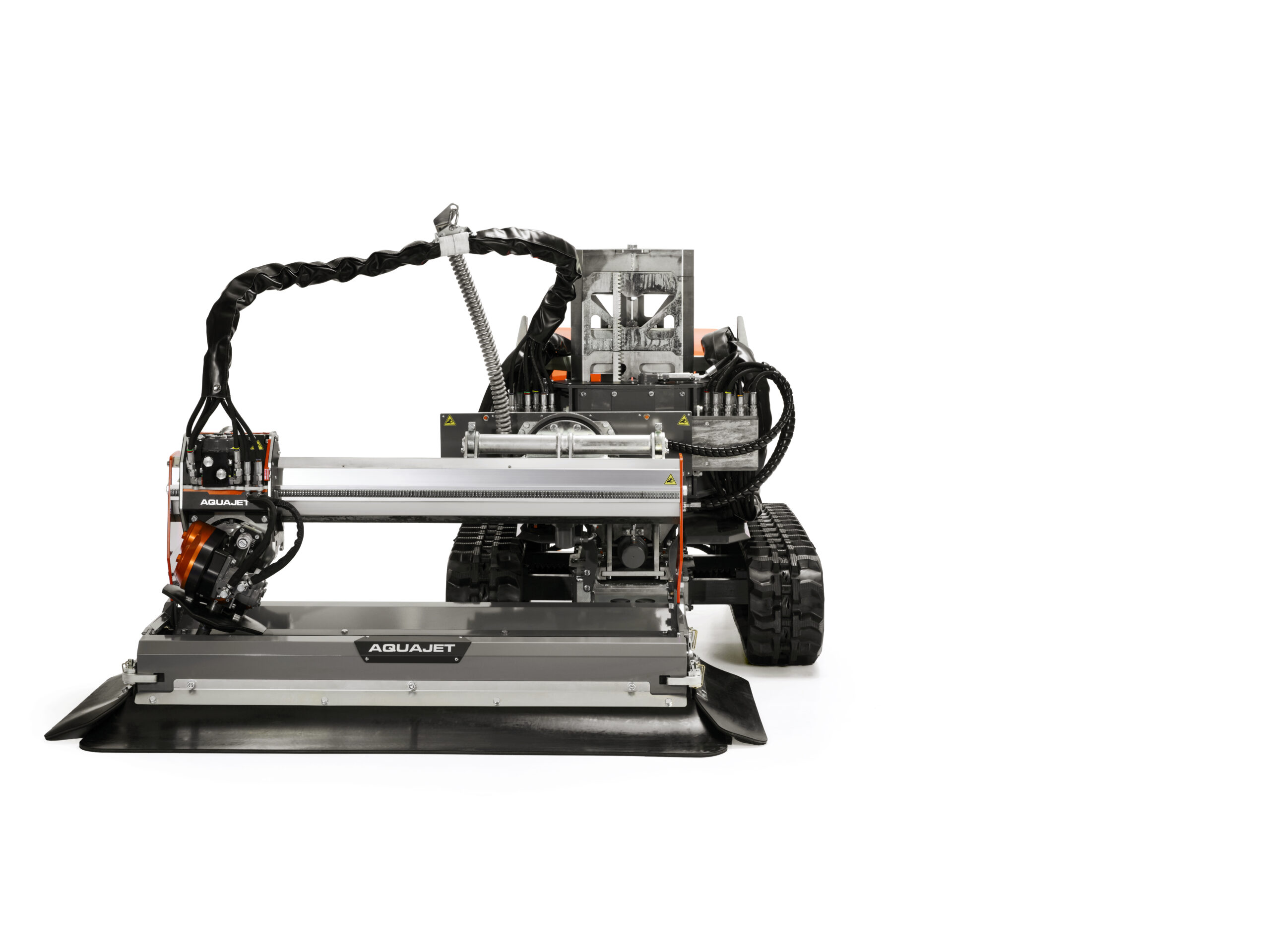
Featured on all Aqua Cutter V-models, Aquajet’s Multi-axis 3D Positioning System gives operators precise control of the robot’s tower and front section for optimized lance positioning in virtually any direction. The system improves flexibility, stability, reach, and accessibility when working on high walls, confined spaces, and difficult-to-reach hydrodemolition applications.

Multi-positioning capabilities
for optimized hydrodemolition.



Multi-axis positioning for demanding hydrodemolition
Aquajet’s Multi-axis 3D Positioning System is designed to maximize flexibility, reach, and positioning precision during demanding hydrodemolition applications.
Integrated into all Aqua Cutter V-models, the system allows the tower and front section of the robot to move in multiple directions for optimized lance positioning and improved access to complex surfaces.
The tower positioning function allows the tower to move forward and backward to precisely control the distance between the nozzle and the concrete surface. When fully extended, the tower also increases stability, allowing the robot to handle greater reaction forces during operation. The retractable movement additionally simplifies inspection by allowing operators to check the surface and then return to the exact same working position.
Vertical hoist movement extends the robot’s reach on high walls and tall structures, while the nearly 360° rotating front section improves accessibility in confined or complex work areas.
The hydraulic side shift function allows the entire front section to move sideways without repositioning the robot, helping operators work efficiently even when the machine cannot be placed directly in front of the target surface.
Combined with tilt functionality and manual beam offset options, the Multi-axis 3D Positioning System provides the flexibility and precision needed for demanding hydrodemolition environments.
Features
-

Tower positioning system
Move the tower forward and backward to precisely adjust the distance between the robot and the target surface while improving…
Move the tower forward and backward to precisely adjust the distance between the robot and the target surface while improving stability during operation. When extended, the tower positioning system increases stability and allows the robot to manage greater reaction forces.
-

Vertical hoist movement
Raise or lower the front section along the tower for extended vertical reach on tall structures and walls.
Raise or lower the front section along the tower for extended vertical reach on tall structures and walls.
-

Nearly 360° front rotation
The front section can rotate nearly 360° for optimized access to confined spaces and complex geometries.
The front section can rotate nearly 360° for optimized access to confined spaces and complex geometries.
-
Hydraulic side shift function
Shift the entire front section sideways to improve reach and positioning when the robot cannot be placed directly in front…
Shift the entire front section sideways to improve reach and positioning when the robot cannot be placed directly in front of the work area.
-
Manual beam offset
On all 450 and 750 models, as well as the Aqua Rail system, the complete roller beam can be offset…
On all 450 and 750 models, as well as the Aqua Rail system, the complete roller beam can be offset sideways in its brackets. This allows you to extend reach or adapt the setup for specific tasks.
-

Tilt function
Tilt the front section up or down for improved wall work positioning and easier visual inspection of the hydrodemolition result.
Tilt the front section up or down for improved wall work positioning and easier visual inspection of the hydrodemolition result.
-

Improved accessibility in confined areas
The combined positioning functions help operators access hard-to-reach surfaces without repositioning the entire robot.
The combined positioning functions help operators access hard-to-reach surfaces without repositioning the entire robot.
